-
day14교육/서울 ICT 이노베이션 고오급 시각과정 2021. 9. 1. 12:29728x90
threshold찾는 방법
1. OTZU
이진화한 픽셀들을 각각 모아서 표준 편차를 내고 표준편차의 합이 최소가 되는 threshold찾는 방법
모든 threshold를 간격을 좁혀가면서 돌려봄
2. GMM(gaussian mixture model)
영상의 밝기값의 분포가 가우시안 분포의 합이라고 생각
가우시안 평균과 시그마를 랜덤으로 세팅+사우시안 모델을 몇개로 세팅할 것인지 가정(이진화하면 2개가 확실하니까 2개의 가우시안 분포로 히스토그램이 이루어졌다는 게 확실) 후 믹스처 모델을 반복적인 방법으로 학습(EM알고리즘(MeanShift처럼 돌아가는데 특정 threshold영역대신 가우시안 분포가 움직인다고 생각하면 됨)
더보기MeanShift?
특정 threshold 영역 내의 모든 점들의 평균을 내서 중심을 옮기고 옮기고 옮기고,,,,반복
3. Clustering
처음 시작점을 분포의 끝과 끝으로 두고 범위를 정해서 평균을 내고 옮기고 평균을 내고 옮기고 GMM의 1차원 버전이라고 생각하면 됨
K means clustering
라벨링이 안 되어있는 데이터를 그룹화
k->하이퍼 파라미터, 사람이 정해줘야함 k개의 그룹으로 나눈다는 의미
임의의 점이 각 그룹의 중심점에서 얼마나 가까운지 판단하여 그룹으로 분류하고 그룹의 평균을 내서 그룹의 중심점을 이동시킴, 계속 반복(EM알고리즘의 변형)
더보기EM 알고리즘?
Expectation Maximization
어떤 자료를 잘 모르는 상태에서 평균을 반복적으로 구해서 값을 구해나가는 알고리즘
SLAM
Simultaneous Localization And Mapping
영상 및 기타 센서를 통한 3차원 공간 인식 기술
원리
카메라를 (0,0,0)으로 했을 때의 물체 위치를 파악하고 카메라의 위치를 바꾸고 두 번 파악
물체는 고정되어있다 가정하고 물체끼리 포인트를 비교하면서 카메라 위치 추측
->프레임끼리 비교하여 역추적하여 카메라의 위치를 계산해서 누적해나가는 것
방법
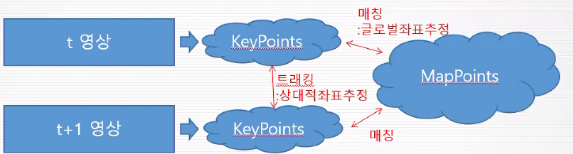
Localization
이미 맵이 생성있다고 가정하고 내가 어디에 위치해있는지 추측
- 맵포인트와 매칭 결과로 현재 위치를 얻음
- 매칭 결과가 없을 경우 트래킹으로부터 상대적 위치를 파악
Mappinng
- Localization을 수행함
- 현재 영상의 키포인트와 맵포인트간의 매칭 개수가 적을 경우 혹은 기존의 키프레임과 거리가 클 경우
- 새로운 키프레임을 생성하고 해당 키 프레임이 나타난 키포인트를 맵 포인트로 저장
- 새로운 키프레임은 기존 키프레임과의 유사도에 따라 그래프 에지를 생성
- 결과적으로 상대적 좌표 추정 결과를 누적
키포인트
물체를 구분하는 특징점
키포인트 추출하는 방법
복잡한 부분은 키포인트로 추출하기 쉬움
단순하거나 반복되는 부분은 키포인트로 추출하기 어려움
더보기좋은 특징점이란?
- 반복성
- 기하학적 변환이나 영상 변화와 관계없이 일정한 곳에서 항상 특징이 검출되어야 함
- 구별성
- 각각의 특징은 다른 곳에 비해 특별히 구분
- 압축성과 효율성
- 적절한 수의 특징점을 검출
- 지역성
- 작은 지역을 대표해야함
예전에는 코너를 추출해서 특징점으로 많이 사용+Optical Flow알고리즘
영상의 변화가 크지 않고 국지적인 곳에 자주 사용
지금은 BLOB(원형 코너,바깥쪽 원이 밝거나 어둡고 안쪽 원이 어둡거나 밝은 것)을 많이 씀
+Difference of Gaussian(큰 BLOB영상-작은 BLOB영상=필터->BLOB의 특징을 알아낼 수 있음)
+Efficient implementation
키포인트 매칭하는 방법
특징끼리 구분, 비교할 수 있도록 벡터로 나타냄
1. 템플릿 매칭
영상의 한 부분을 템플릿으로 다음 영상의 템플릿들과 비교하면서 뺄셈을 했을때 가장 작은 값이 나오는 곳이 일치된 특징점이라고 생각
하지만 조금만 각도가 변하거나 하면 못 찾는 문제
2. SIFT
Scale-invariant Feature Transform
피라미드이미지(크기 별로 이미지를 생성하고 각각에 대해 다른 스케일의 Gaussian Blur적용)를 생성하여 피라미드 Blob(각각의 스케일에 따라 Blob이미지를 도출)생성하여 Blob의 가장 높은 지점의 Blob을 특징점으로 도출, 각각의 특징점(키포인트)에 대해 대표 방향 성분(히스토그램으로 나타내어 80%이상인 것을 가지고 대표 방향으로 추출)을 추출하고 4*4영역에 대해 8bin HOG도출하여 비교시 가중치 부여
3. SURF
SIFT알고리즘에서 4*4영역에 대해 8bin HOG를 도출할 때 시간이 너무 오래 걸리고 회전한 영역에 대해서 추출하는 건 어렵기 때문에 나온 알고리즘
dx,dy를 이용하여 방향성분을 추출하여 픽셀 단위가 아닌 넓은 영역에서 간단하게 대표 방향 성분을 추출
바이너리 디스크립터
4.